Product Description & Technical Details
Product Description
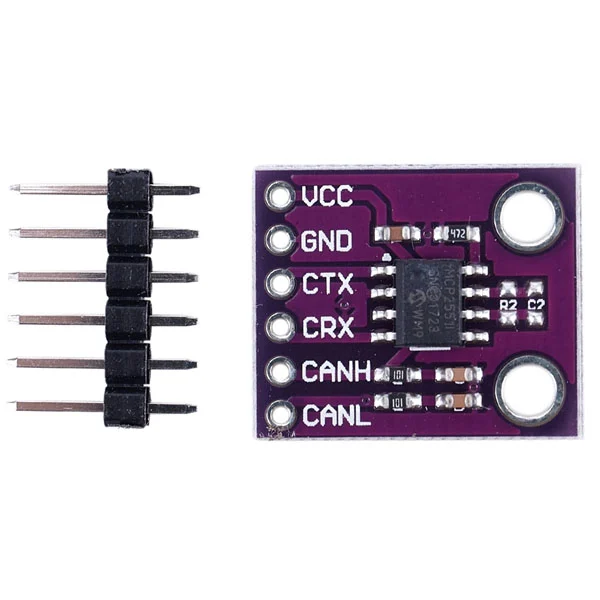
The MCP2551 CAN Protocol Interface Module is a high-speed CAN transceiver that acts as the bridge between a CAN protocol controller (like the MCP2515 or a built-in MCU CAN peripheral) and the physical differential bus wires. It is designed for automotive and industrial applications where high noise immunity and reliable data transfer over long distances are critical. This module converts the digital TTL signals from a microcontroller into the differential voltage signals required for the CAN high (CANH) and CAN low (CANL) lines. It is an essential component for anyone at Robogears looking to interface with a vehicle's OBD-II system or build a robust industrial sensor network.
Key Highlights
High-Speed Communication: Fully supports the ISO-11898 standard physical layer requirements with data rates up to 1 Megabit per second (Mb/s).
Automotive Grade Robustness: Designed to handle the harsh electrical environments of vehicles, including protection against battery short circuits and high-voltage transients.
Excellent Noise Immunity: The differential signaling architecture ensures that the data remains intact even in the presence of heavy electromagnetic interference (EMI).
Slope Control Mode: Features an adjustable slope control to reduce RFI (Radio Frequency Interference) emissions, which is critical for sensitive electronics.
Low Current Standby: Includes a low-power standby mode that allows the controller to minimize energy consumption when the bus is inactive.
Technical Specifications
Input Logic Levels: Compatible with 5V logic (Standard Arduino)
Differential Output: High-drive capability for long cable runs
Protection: ±40V transient protection on CAN pins
Operating Temperature: -40°C to +125°C
Dimensions: ~18mm x 15mm
Installation Tip from Robogears
The MCP2551 is a Transceiver, not a full controller. This means it handles the physical wires but needs a Controller (like an MCP2515 or a Teensy/ESP32 with a built-in CAN core) to handle the data frames. For a functional network, you must have at least two nodes. Also, remember that a CAN bus requires 120-Ohm termination resistors at both ends of the physical cable to prevent signal reflection. If your module doesn't have one built-in, you should add a resistor across the CANH and CANL terminals.
Note: This product is the MCP2551 Transceiver Module ONLY. A separate CAN controller (like MCP2515) is required for Arduino Uno. Product images are for illustration purposes only.